- El ruido eléctrico son perturbaciones no deseadas que degradan la señal y pueden causar fallos graves en sistemas analógicos, digitales y de control.
- Se origina en múltiples fuentes internas y externas y se acopla por impedancia común, inducción magnética, acoplamiento capacitivo y radiación EM.
- Distinguir entre ruido de modo normal y de modo común es clave para proteger fuentes conmutadas y hardware informático frente a daños.
- Una buena puesta a tierra, cableado separado, filtrado, apantallamiento y el uso de UPS On Line o transformadores de aislamiento reducen al mínimo su impacto.

Cuando trabajas con circuitos electrónicos, tarde o temprano te encuentras con un enemigo silencioso que lo complica todo: el ruido. Es ese conjunto de señales indeseadas que se cuelan en tus mediciones, distorsionan formas de onda, vuelven locos a los controladores y hacen que un sistema que “debería ir perfecto” se comporte de forma errática. Aunque muchas veces se habla de él como algo abstracto, el ruido eléctrico tiene causas muy concretas y efectos bien conocidos.
Entender qué es el ruido en electrónica y cómo afecta no es solo cosa de ingenieros de diseño avanzado; también es clave si instalas, mantienes o simplemente utilizas equipos industriales, ordenadores, fuentes de alimentación o sistemas de medida. A lo largo de este artículo vamos a desmenuzar de forma detallada qué tipos de ruido existen, cómo se acoplan a los circuitos, qué problemas generan en sistemas analógicos, digitales y fuentes de alimentación conmutadas, y qué técnicas prácticas se usan para reducirlo al mínimo posible.
Qué es el ruido eléctrico en electrónica

En electrónica se denomina ruido eléctrico a las perturbaciones, fluctuaciones o señales no deseadas que se superponen a la señal útil dentro de un circuito o sistema. Estas perturbaciones pueden ser aleatorias o tener cierto patrón, y se originan tanto en causas internas (componentes, fuentes de alimentación, conmutaciones, agitación térmica de los electrones) como en fuentes externas (motores, soldaduras, rayos, transmisores de radio, etc.).
El término “ruido eléctrico” se popularizó en los inicios de la radio AM, cuando al escuchar una emisora aparecían chasquidos o crujidos provocados por rayos u otros arcos eléctricos; ese sonido indeseado, que tapaba la señal de audio, se acabó llamando “ruido”. Hoy el concepto se extiende a cualquier sistema electrónico o de control, aunque no haya sonido de por medio.
En un sistema de control moderno, donde la electrónica suele trabajar a niveles de tensión muy bajos y con lógica integrada, incluso pequeñas cantidades de ruido pueden desencadenar problemas importantes: errores de comunicación, conmutaciones indebidas de salidas, indicadores que se resetean sin motivo aparente o alarmas que saltan sin que exista realmente una condición de fallo.
Desde el punto de vista de la señal, el ruido se manifiesta como una variación adicional de la tensión o la corriente respecto a la forma de onda ideal. En el tiempo se ve como irregularidades, oscilaciones, picos o “pelillos” sobre la señal, y en el dominio de la frecuencia aparece repartido en diferentes bandas, a veces ocupando prácticamente todo el espectro (como el ruido blanco) y otras concentrado en ciertas frecuencias.
Consecuencias del ruido en sistemas electrónicos
La primera consecuencia del ruido es la degradación de la señal. Cuando la amplitud del ruido es comparable a la de la señal útil, la forma de onda se distorsiona, se atenúa o incluso puede llegar a resultar irreconocible. En comunicaciones, esto se traduce en pérdida de información, errores de bits o interrupciones de enlace; en audio, en chasquidos o zumbidos; en control, en lecturas inestables que hacen que un regulador “persiga” un valor que nunca se asienta.
Otro efecto muy frecuente es la interferencia entre sistemas. El ruido que genera un equipo se puede acoplar a los cables de otro, o radiarse por el espacio, produciendo EMI (interferencias electromagnéticas) o RFI (interferencias de radiofrecuencia). Esto genera problemas de compatibilidad electromagnética (EMC): dispositivos que dejan de comunicarse, sensores que miden cosas absurdas, equipos de medida que pierden precisión cuando se enciende una máquina cercana, etc.
En sistemas digitales, el ruido es especialmente peligroso porque puede alterar los niveles lógicos que representan un 0 o un 1. Si un impulso de ruido supera el umbral de conmutación de una puerta lógica o de una entrada de microcontrolador, el circuito interpreta un cambio que en realidad no existe. Eso puede provocar errores de cómputo, cambios espurios de estado, fallos intermitentes o bloqueos de software que son muy difíciles de reproducir y depurar.
En sistemas analógicos de medida, el ruido reduce la precisión y la resolución efectiva. Señales de muy baja amplitud, como las de sensores y termopares, son especialmente vulnerables: basta una pequeña interferencia para desviar lecturas, introducir oscilaciones o enmascarar cambios reales. La agitación térmica, diferencias de temperatura entre conexiones metálicas o efectos químicos en contactos mal hechos también introducen ruidos de muy baja tensión que se suman a la señal.
Además de la degradación de la señal, el ruido tiene consecuencias energéticas: corrientes de fuga no deseadas, disparos falsos de dispositivos de potencia, pérdidas por conmutaciones involuntarias y, en general, una disipación extra que puede incrementar el consumo y el calentamiento de ciertos componentes. En casos extremos, un exceso de ruido puede hacer que un sistema se vuelva inestable e impredecible, con reinicios aleatorios, caídas de servicio y comportamientos erráticos.
Tipos de ruido y características básicas

Dentro del amplio concepto de ruido eléctrico se pueden distinguir diversas categorías en función de su origen, su comportamiento en el tiempo y su forma de acoplarse al circuito. Uno de los más importantes a nivel físico es el ruido electrotérmico o Johnson, debido al movimiento aleatorio de los electrones en un conductor por efecto de la temperatura.
El ruido electrotérmico tiene una relación directa con la temperatura absoluta, el valor de la resistencia y el ancho de banda del sistema. A mayor temperatura, más agitación de los portadores y mayor ruido; a mayor resistencia u ancho de banda, más potencia de ruido. Como aparece en todas las frecuencias de forma prácticamente uniforme, se le suele agrupar dentro del llamado “ruido blanco”.
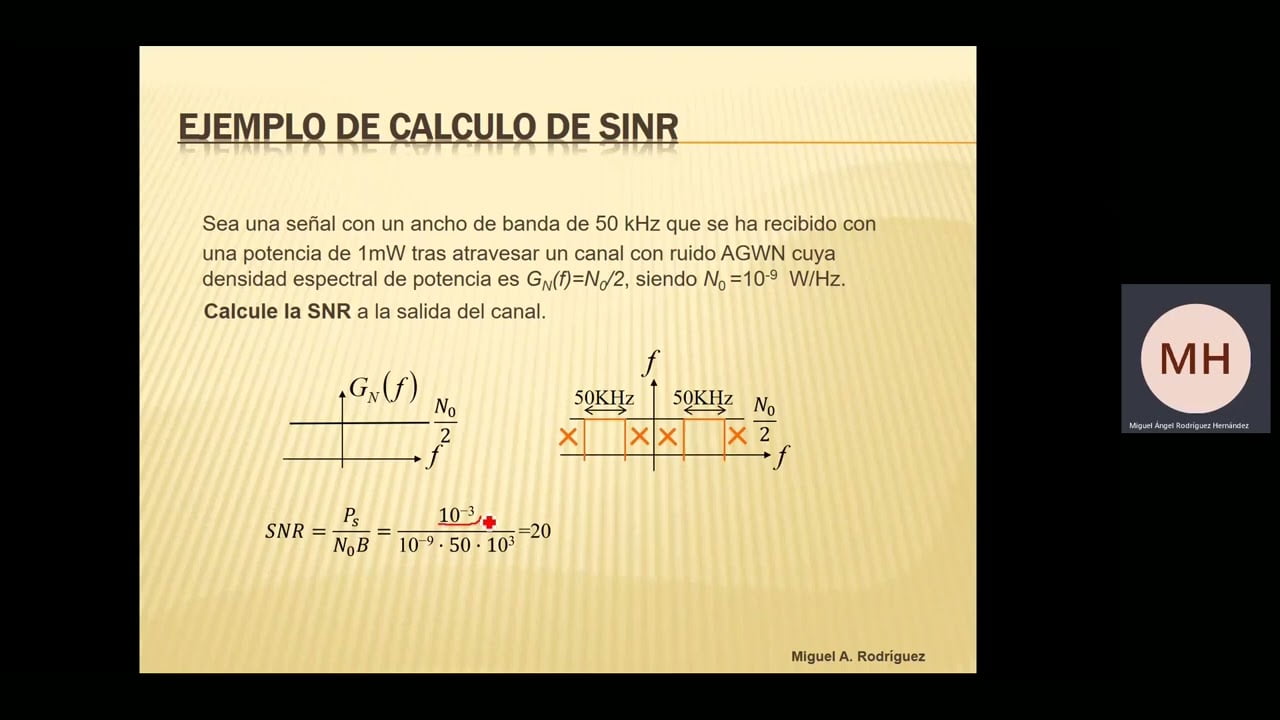
Se habla de ruido blanco cuando la densidad espectral de potencia es aproximadamente constante en un rango muy amplio de frecuencias. La analogía con el color blanco viene de la óptica: al igual que la luz blanca contiene todas las frecuencias visibles, el ruido blanco contiene componentes en un amplio espectro. En electrónica, esto significa que no basta con filtrar una banda estrecha; el ruido está repartido y se deja notar en todo el rango de interés.
En dispositivos activos como amplificadores operacionales, se utiliza a menudo un modelo equivalente de ruido: al operacional ideal se le añaden fuentes de tensión de ruido en serie con la entrada y fuentes de corriente de ruido en paralelo, que representan los efectos combinados de resistencias, transistores y otros elementos internos. Este modelo permite analizar cómo se suma el ruido de cada componente y cómo se transfiere a la salida.
Una consecuencia práctica importante de la suma de ruidos independientes es que las contribuciones se combinan en cuadratura (como suma cuadrática). Si una de las fuentes de ruido tiene una amplitud al menos tres veces inferior a las demás, su contribución al ruido total es tan pequeña que puede despreciarse sin afectar de forma apreciable al resultado. Esto simplifica mucho los cálculos y el diseño de sistemas de bajo ruido.
Ruido en el dominio del tiempo y de la frecuencia
Cuando se observa el ruido en el dominio del tiempo, lo que se ve es cómo la tensión o la corriente se desvían de la forma de onda ideal: pequeñas ondulaciones, picos, impulsos cortos, irregularidades superpuestas a la señal principal. Estas características temporales ayudan a identificar si el ruido es más bien impulsivo (picos breves y de alta amplitud), aleatorio continuo (fluctuaciones constantes), o periódico (armónicos de la red, por ejemplo).
En el dominio de la frecuencia, el ruido se puede analizar a través de su espectro. Ahí es donde se diferencian claramente fenómenos como el ruido blanco (espectro plano), el ruido de baja frecuencia (flicker o 1/f) o bandas específicas asociadas a motores, fuentes conmutadas o redes eléctricas. Este análisis espectral es clave para diseñar filtros y blindajes adecuados, porque permite atacar la zona del espectro donde el ruido es más molesto.
Los amplificadores operacionales y otros dispositivos de medida suelen especificar sus características de ruido tanto en el dominio del tiempo (valor eficaz, pico a pico) como en densidad espectral (nV/√Hz, pA/√Hz). Estos parámetros permiten prever hasta qué punto el ruido del propio dispositivo contribuirá al error global del sistema y cómo afectará a la resolución efectiva de una medida.
En cualquier sistema real, hay que tener en cuenta que la combinación de señal útil, ruido y filtrado produce una forma de onda final que puede estar muy alejada de la ideal. Por eso es tan habitual que, en prácticas de laboratorio y en protoboards, se vean en el osciloscopio señales “peludas” o deformadas que mejoran notablemente tras aplicar un filtrado correcto o un buen apantallamiento.
La selección del ancho de banda de medida es fundamental: cuanto mayor sea el ancho de banda del instrumento o del circuito, más componentes de ruido dejará pasar, elevando su nivel eficaz. Reducir el ancho de banda al estrictamente necesario es una de las técnicas más sencillas y eficaces para reducir el impacto del ruido en la señal final.
Fuentes típicas de ruido eléctrico en entornos industriales y domésticos
El entorno industrial moderno está repleto de elementos capaces de generar ruido eléctrico de todo tipo. Cualquier dispositivo que produzca cambios bruscos en la corriente o en la tensión puede ser una fuente importante de perturbaciones: motores, contactores, solenoides, hornos de soldadura, iluminación con balastos electrónicos, etc.
Entre las fuentes de ruido más habituales se encuentran los interruptores y contactos de relé que conmutan cargas inductivas. Al abrir o cerrar el circuito de un motor o una bobina sin las protecciones adecuadas, se generan picos de tensión y arcos eléctricos que se propagan por la red y por el espacio, acoplándose fácilmente a los circuitos de control cercanos.
Los dispositivos de potencia basados en semiconductores, como tiristores, triacs o controladores SCR, también generan ruido cuando se disparan de forma aleatoria o por ángulo de fase. Cada conmutación abrupta inyecta armónicos y picos de corriente en la red, que pueden afectar a equipos sensibles conectados al mismo sistema de alimentación.
Las máquinas de soldadura, los conductores que llevan corrientes elevadas y las luminarias fluorescentes o de neón son ejemplos clásicos de fuentes ruidosas. Además, en circuitos de medida muy delicados, incluso fenómenos como tensiones térmicas entre metales distintos, acción electrolítica en conexiones húmedas o la temperatura ambiente de la electrónica contribuyen con pequeñas tensiones de ruido que se suman a la señal.
Un caso curioso se da cuando un relé mecánico integrado en un controlador, pensado como salida, se usa para conmutar cargas de alta corriente. La propia conmutación dentro del equipo introduce ruido inductivo y arcos que se “cuelan” en los circuitos de baja señal del mismo controlador, disparando fallos o lecturas erróneas desde dentro del propio dispositivo.
Cómo se acopla el ruido a los circuitos: mecanismos principales

Para entender cómo entra el ruido en un circuito hay que pensar en el sistema completo: líneas de alimentación, cables de sensores, salidas, tierras, chasis y entorno electromagnético. El ruido puede colarse por varios mecanismos de acoplamiento bien definidos, y muchas veces aparecen combinados.
- Acoplamiento por impedancia común
Este acoplamiento se produce cuando dos o más circuitos comparten un mismo conductor de retorno, neutro, tierra o incluso una fuente de alimentación. Al circular corrientes variables por esa impedancia común, se producen caídas de tensión que se suman como ruido a otros circuitos que no tendrían por qué verlo. Es típico en instalaciones donde se agrupan varias cargas en un mismo neutro largo o se usan retornos compartidos.- Un ejemplo clásico es el de varios solenoides gobernados por contactos de relé, todos con sus retornos unidos en un único conductor de vuelta a la fuente. Los cambios bruscos de corriente de un solenoide pueden inducir perturbaciones en los demás a través de esa impedancia común. La solución ideal consiste en eliminar la línea de retorno compartida y utilizar conductores de retorno independientes para cada circuito, llevándolos a un mismo punto de referencia físico y eléctrico.
- Los bucles de tierra son otra cara del mismo problema. Cuando existen varias rutas diferentes para las corrientes de tierra, se generan corrientes circulantes que introducen ruido sobre las referencias de los circuitos. Por eso es tan importante que las tomas de tierra de seguridad y las tierras de señal estén bien definidas y que no se usen indiscriminadamente como retornos de corriente.
- Acoplamiento inductivo o magnético
El acoplamiento magnético aparece cuando campos magnéticos variables, generados por corrientes alternas en un conductor, inducen tensiones en conductores cercanos. Es la clásica interferencia entre cables que discurren en paralelo a poca distancia, muy habitual cuando se hace “un mazo ordenado” con cables de potencia y cables de señal juntos para que quede todo más limpio visualmente.- La forma más efectiva de reducir el acoplamiento inductivo es separar físicamente los tendidos de cables de alta corriente o alta tensión (por ejemplo, alimentación de motores) de los cables de señal de bajo nivel (sensores, comunicación, control). El uso de pares trenzados y cables apantallados, con el blindaje conectado a tierra únicamente en el extremo del controlador, ayuda a cancelar campos magnéticos y minimizar la tensión inducida.
- Acoplamiento electrostático o capacitivo
Este tipo de acoplamiento depende de la capacitancia entre conductores: cuanto más paralelos y cercanos estén, y cuanto mayor sea su diámetro, mayor será la capacidad y, por tanto, el ruido que se transfiere. Cambios rápidos de tensión en un cable pueden inyectar corriente capacitiva en otro, generando interferencias especialmente molestas en entradas de alta impedancia.- El remedio principal frente al acoplamiento capacitivo es el blindaje y la correcta disposición del cableado. Separar cables de CA de alto nivel de los de CC de bajo nivel, minimizar tramos largos en paralelo y usar pantallas metálicas conectadas adecuadamente a tierra reducen de forma drástica este tipo de interferencia.
- Acoplamiento electromagnético radiado
En este caso el ruido viaja realmente como una onda electromagnética por el aire, sin necesidad de un camino conductor directo entre la fuente y el receptor. Torres de radio, emisoras de televisión, equipos de soldadura, contactores de potencia o motores grandes pueden irradiar campos suficientemente intensos como para inducir tensiones en circuitos de medida o comunicación cercanos.- La interferencia radiada (RFI/EMI) es difícil de eliminar una vez que se ha acoplado, porque exige blindajes casi perfectos (cerrados al 100 %). Lo habitual es atacar el problema desde el diseño: alejar el cableado sensible de las fuentes de radiación, usar carcasas metálicas conectadas a tierra, filtrar las entradas y salidas que atraviesan el blindaje y, cuando es posible, rediseñar las trayectorias de los cables para minimizar su área expuesta.
Ruido en la línea de alimentación y problemas asociados
La propia red de alimentación de CA es una fuente de perturbaciones no despreciable. Problemas como desequilibrios de fase, microcortes, caídas de tensión, sobretensiones transitorias, rayos o picos generados por grandes cargas hacen que la tensión suministrada sea mucho menos “limpia” de lo que se podría pensar.
Cuando el ruido en la línea de alimentación tiene un componente puramente eléctrico (picos, armónicos, interferencias de alta frecuencia) sin provocar una caída sostenida del nivel de tensión, suele poder mitigarse mediante filtros de línea específicos. Estos dispositivos integran inductancias y condensadores que atenúan los componentes de alta frecuencia e impiden que lleguen a los circuitos sensibles.
Si el problema son variaciones importantes de la tensión (bajadas prolongadas, apagones, cables mal dimensionados que producen caídas exageradas), entonces ya no basta con filtros: es necesario corregir la distribución y sección de los conductores, estabilizar la tensión o incluso recurrir a sistemas de alimentación ininterrumpida (UPS) que regeneren completamente la señal.
En computación y electrónica de precisión, se presta especial atención a los ruidos en la línea de energía porque entran directamente a las fuentes de alimentación internas. En particular, hay que diferenciar dos tipos fundamentales de ruido que se propagan por la línea: el ruido de modo normal (o diferencial) y el ruido de modo común.
En un sistema típico con tres conductores (vivo, neutro y tierra), la potencia se distribuye entre vivo y neutro, mientras que el conductor de tierra actúa como elemento de seguridad. El ruido puede aparecer como diferencia de potencial entre vivo y neutro (modo normal) o como tensión simultánea en vivo y neutro respecto a tierra (modo común). Ambos tienen efectos muy distintos en las fuentes de alimentación y en el hardware que alimentan.